技术解析:FSD Beta如何征服环形路口
发布日期: 2020-11-04来源: 无人车情报局
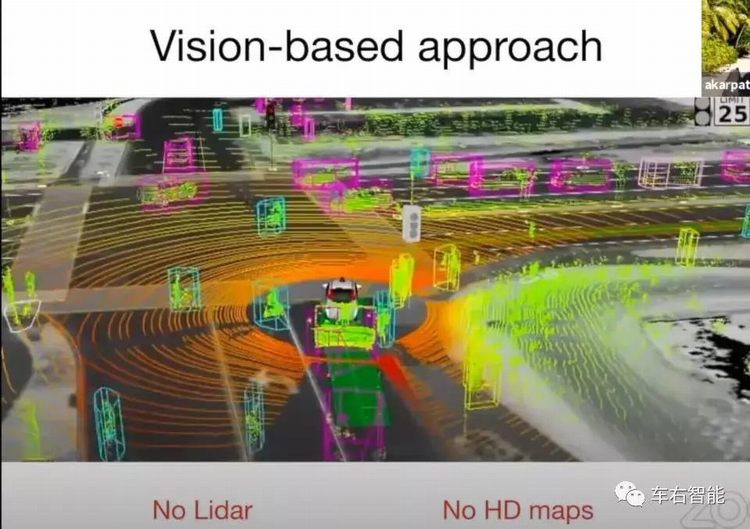
对于整个业内来说,如何评判Tesla的“Vision-based approach”到底行不行,就是最核心最关键的地方:
第一, 应该认真分析FSD Beta到底有没有依赖高精度地图,以及对于导航地图的利用方式;
第二, 应该认真分析视觉系统下FSD Beta的感知准确率和决策成功率。
本期内容聚焦环岛/Roundabout路口,看看新出的一些专门评测FSD Beta通过环岛表现的视频内容。客观上在美国公路体系内,结构相当复杂的环岛比比皆是,考核FSD Beta的视觉识别能力/神经网络的预测和决策能力,以及导航地图是如何被应用的等等这些细节,在环岛条件上,相对内容丰富且直观易懂。

上图显示一个光照条件良好的环岛路口。人类司机在这个角度看过去,可以通过经验判断的是:
这是一个环形路口;
大致地落在视线范围内的环形路口直径和车道宽度;
而人类驾驶员无法判断的是:
这个环形路口共有多少个出入口(因为从这个角度看,人类司机无法获取环形路口全貌);
所有环岛出入口的具体位置;
但实际上也不难理解,即便人类驾驶员面对环形路口不能一次性在进入环形车道前掌握所有路口信息(以上的3和4),但实际上并不会影响人类司机驶入路口的这部分决策。因为人类驾驶员在解决通过环形路口之前,第一是明确知道环岛必定存在通向正确方向的出口,第二是正确的出口可以在环形道路上逐渐发现。只要确定这两点,就必然可以顺利通过。这是人类驾驶员面对这种问题解决之道,那就是也是Tesla Autopilot的技术取向。
小编在这里需要进一步解释的是,Tesla不选择先验信息(HD map)的原因并不是认为HD map毫无价值,而是认为只要车载算力足够强大,那么即时条件下观察(感知-预测-决策-执行)能力就足够强大,就可以替代成本高昂的先验信息。这个说法在理论上是毫无问题,只是个执行问题。当然,小编也不反对,如果高精地图的制造和维护都变得非常容易和普及了(同时还必须要有同等精度级别的高精度定位能力),那么先验知识对于车辆控制的长周期规划能力的提升,也就是安全性和通行效率的提升,还是大有裨益的。但如果仅仅是站在今天的角度看…… 就问一个问题,有多少道路占比可以持续另车辆实现高精度的自身定位呢?
回到上图,我们可以看到黄色箭头所指之处,FSD Beta可以在“即时时刻”绘制出环岛可见部分的车道线,且精度足够FSD Beta完成对于主车的路径规划和控制(UI中的蓝色曲线线条)。只是无法确定车速对于路径规划的影响是在一个什么样的范围(车速越快,对于车载计算力就越高,预规划路线的距离就应该越短)。

上图是此刻的UI细节。黄色箭头处我们可以看到导航地图所能提供的环形路口的几何拓扑信息,显示这是一个三个出入口的环岛结构。如果我们返回去看人类驾驶员无法判断的信息3,那么这个问题就这样直接地、低成本地被解决了,导航地图级别的粗定位能力在当今是普及的。因此现在唯一的问题就是信息4,出口的精准位置在哪里的问题了。
当主车驶入环岛,并随着路线旋转时,前方路口出现了。如上图所示,此时FSD Beta内部的决策就不应该再是完全依赖神经网络了,当神经网络在此刻根据视觉信息捕捉到道路出口并完成识别/identification的时候,只需要FSD Beta通过简单的代码逻辑判别这是否是第一个完成识别的“标准出口”之后,即可推动道路规划和控制系统完成脱离换道的动作,如上图中蓝色曲线线条。
