前沿!主流自动驾驶仿真软件及总结
发布日期: 2021-01-07来源: 技术邻CAE学院
导读
现有的仿真软件主要包括CarSim、CarMaker、PreScan、PTV Vissim、SUMO、VIRES VTD、rFpro、Cognata、VIRES VTD、51Sim-One、Pilot-D GaiA、Metamoto、腾讯TAD Sim仿真平台、 百度 Apollo、AirSim 、NVIDIA Drive ConstellationWaymo Carcraft、PanoSim等。
素材来自《自动驾驶仿真蓝皮书 》。
CarSim
CarSim, 还有相关的 TruckSim 和 BikeSim 是 Mechanical Simulation 公司开发的强大的动力学仿真软件, 被世界各国的主机厂和供应商所广泛使用。CarSim 针对四轮汽车, 轻型卡车, TruckSim 针对多轴和双轮胎的卡车, BikeSim 针对两轮摩托车。CarSim 是一款整车动力学仿真软件, 主要从整车角度进行仿真, 它内建了相当数量的车辆数学模型, 并且这些模型都有丰富的经验参数, 用户可以快速使用, 免去了繁杂的建模和调参的过程。CarSim 模型在计算机上运行的速度可以比实时快 10 倍, 可以仿真车辆对驾驶员控制, 3D 路面及空气动力学输入的响应,模拟结果高度逼近真实车辆, 主要用来预测和仿真汽车整车的操纵稳定性、 制动性、 平顺性、 动力性和经济性。CarSim 自带标准的 Matlab/Simulink 接口,可以方便的与 Matlab/Simulink 进行联合仿真, 用于控制算法的开发, 同时在仿真时可以产生大量数据结果用于后续使用 Matlab 或者 Excel 进行分析或可视化。CarSim 同时提供了 RT 版本, 可以支持主流的 HIL 测试系统, 如 dSpace 和 NI 的系统, 方便的联合进行 HIL 仿真。
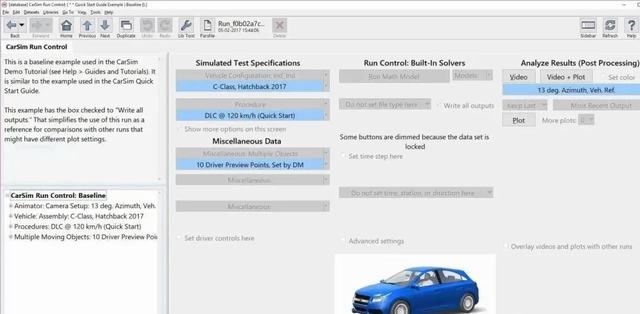
CarSim 也有 ADAS 相关功能的支持, 可以构建参数化的道路模型, 200 个以上的运动的交通物体, 使用脚本或者通过 Simulink 外部控制它们的运动, 同时添加最多 99 个传感器, 对运动和静止的物体进行检测。最近的 CarSim 版本在 ADAS和自动驾驶开发方面进行了加强, 添加了更多的 3D 资源, 如交通标识牌, 行人等,以及高精地图的导入流程。同时 CarSim 也提供了一个 Unreal 引擎插件, 可以和Unreal 引擎进行联合仿真。
CarMaker
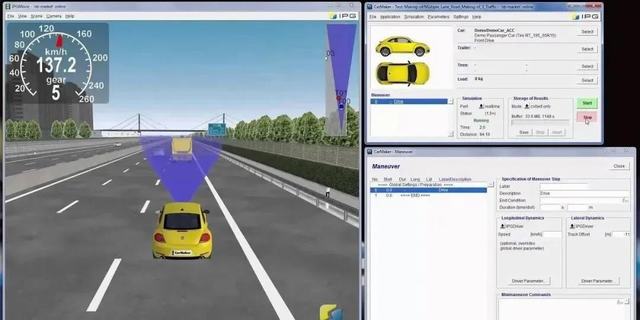
Carmaker, 还有相关的 TruckMaker 和 MotorcycleMaker 是德国 IPG 公司推出的动力学, ADAS 和自动驾驶仿真软件。Carmaker 首先是一个优秀的动力学仿真软件, 提供了精准的车辆本体模型(发动机、 底盘、 悬架、 传动、 转向等) , 除此之外, Carmaker 还打造了包括车辆, 驾驶员, 道路, 交通环境的闭环仿真系统。IPG Road:可以模拟多车道、 十字路口等多种形式的道路, 并可通过配置 GUI生成锥形、 圆柱形等形式的路障。可对道路的几何形状以及路面状况(不平度、 粗糙度) 进行任意定义。IPG Traffic:是交通环境模拟工具, 提供丰富的交通对象(车辆、 行人、 路标、交通灯、 道路施工建筑等) 模型。可实现对真实交通环境的仿真。测试车辆可识别交通对象并由此进行动作触发(如限速标志可触发车辆进行相应的减速动作)。IPG Driver:先进的、 可自学习的驾驶员模型。可控制在各种行驶工况下的车辆, 实现诸如上坡起步、 入库泊车以及甩尾反打方向盘等操作。并能适应车辆的动力特性(驱动形式、 变速箱类型等) 、 道路摩擦系数、 风速、 交通环境状况, 调整驾驶策略。CarMaker 作为平台软件, 可以与很多第三方软件进行集成, 如 ADAMS、 AVLCruise、 rFpro 等, 可利用各软件的优势进行联合仿真。同时 CarMaker 配套的硬件,提供了大量的板卡接口, 可以方便的与 ECU 或者传感器进行 HIL 测试。
PreScan
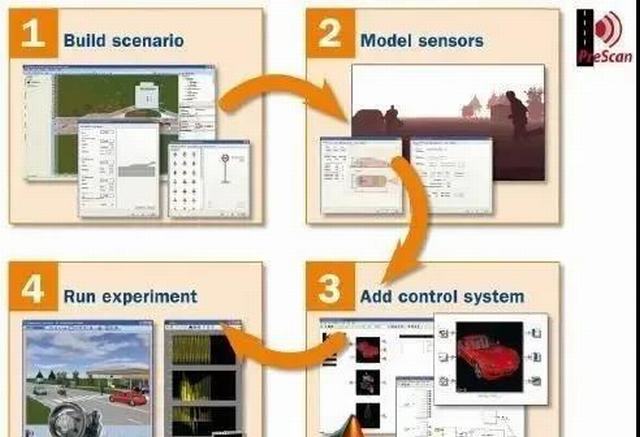
PreScan 是由 Tass International 研发的一款 ADAS 测试仿真软件, 2017 年 8 月被西门子收购。PreScan 是一个模拟平台, 由基于 GUI 的、 用于定义场景的预处理器和用于执行场景的运行环境构成。工程师用于创建和测试算法的主要界面包括 MATLAB 和 Simulink。PreScan 可用于从基于模型的控制器设计 (MIL) 到利用软件在环 (SIL) 和硬件在环 (HIL) 系统进行的实时测试等应用。PreScan 可在开环、 闭环以及离线和在线模式下运行。它是一种开放型软件平台, 其灵活的界面可连接至第三方的汽车动力学模型(例如:CarSIM 和 dSPACE ASM) 和第三方的 HIL 模拟器/硬件(例如:ETAS、 dSPACE 和 Vector) 。Prescan 由多个模块组成, 使用起来主要分为四个步骤: 搭建场景、 添加传感器、 添加控制系统、 运行仿真。场景搭建: PreScan 提供一个强大的图形编辑器, 用户可以使用道路分段, 包括交通标牌, 树木和建筑物的基础组件库, 包括机动车, 自行车和行人的交通参与者库, 修改天气条件(如雨, 雪和雾) 以及光源(如太阳光, 大灯和路灯) 来构建丰富的仿真场景。新版的 PreScan 也支持导入 OpenDrive 格式的高精地图,用来建立更加真实的场景。添加传感器: PreScan 支持种类丰富的传感器, 包括理想传感器, V2X 传感器,激光雷达, 毫米波雷达, 超声波雷达, 单目和双目相机, 鱼眼相机等。用户可以根据自己的需要进行添加。添加控制系统: 可以通过 MATLAB / Simulink 建立控制模型, 也可以和第三方动力学仿真模型(如 CarSim, VI-Grade, dSpace ASM 的车辆动力学模型) 进行闭环控制。运行实验: 3D 可视化查看器允许用户分析实验的结果, 同时可以提供图片和动画生成功能。此外, 使用 ControlDesk 和 LabView 的界面可以用来自动运行实验批次的场景以及运行硬件在环模拟。
PTV Vissim
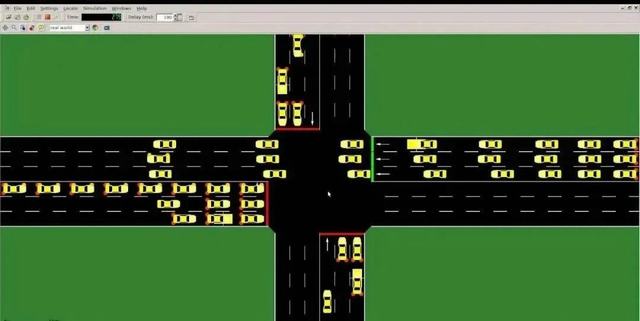
Vissim 是德国 PTV 公司提供的一款世界领先的微观交通流仿真软件。Vissim可以方便的构建各种复杂的交通环境, 包括高速公路, 大型环岛, 停车场等, 也可以在一个仿真场景中模拟包括机动车, 卡车, 有轨交通和行人的交互行为。它是专业的规划和评价城市和郊区交通设施的有效工具, 也可以用来仿真局部紧急情况交通的影响, 大量行人的疏散等。Vissim 的仿真可以达到很高的精度, 包括微观的个体跟驰行为和变道行为, 以及群体的合作和冲突。Vissim 内置了多种分析手段, 既能获得不同情况下的多种具体数据结果, 也可以从高质量的三维可视化引擎获得直观的理解。无人驾驶算法也可以通过接入 Vissim 的方式使用模拟的高动态交通环境进行仿真测试。

SUMO
SUMO 是由德国国家宇航中心开发的开源微观连续交通流仿真软件。它附带了一个交通仿真路网编辑器, 可以通过交互式编辑的方式添加道路, 编辑车道的连接关系, 处理路口区域, 编辑信号灯时序等。也可以通过一个单独的转化程序转换来自 Vissim, OpenStreetMap, OpenDrive 的路网。可以通过编辑路由文件的方式指定每辆车辆的路由, 或者使用参数随机生成。在运行时, 可以同时处理数平方公里, 多达几万辆的车辆的连续交通仿真需求, 同时也提供了一个基于OpenGL 的可视化端实时显示交通仿真的结果。另外, SUMO 还提供了方便的 C++和 Matlab 接口, 可以灵活的与第三方仿真程序联合运行。SUMO 本身是做为交通领域流量, 时序, 预测等仿真来使用的, 最近逐渐开始应用在无人驾驶的仿真上,为无人驾驶算法提供随机的复杂动态环境。